
Historical Background
To order to fully understand RNAV and RNP specifications, it is necessary to look at the historical development of area navigation. In the early days of air transport operations short-range radio aids such as NDB and VOR/DME were installed to allow aircraft to fly within areas of controlled airspace known as Airways. However, while flying in remote areas, such as over oceans where there were no short-range radio aids, navigation was more primitive and aircraft would build up large positional errors by the time they reached airspace within range of radio aids. Therefore, safe aircraft separation was achieved over remote areas by procedurally routing aircraft large distances from each other; in the order of 60nm.
Then in 1953, Charles Draper of MIT developed an Inertial Guidance System for use aboard aircraft, that employed sensitive accelerometers mounted on a gyro-stabilised platform, that could accurately track its position without any reference to radio aids or any external source. However, the Inertial Navigation System (INS) as it became known, was still subject to errors, such as Schuler Loop error, that could allow the INS position to wonder at a rate of about 3nms an hour. So the INS position had to be monitored and periodically updated, using techniques such as astro navigation, to avoid large positional errors building up when flying out of range of other navigation aids. It was a system such as this that was installed on Apollo spacecraft and allowed men to land on the moon in 1969.
Whilst these area navigation (RNAV) systems were quickly adopted on aircraft, it became routine to display and monitor short-range radio aids information, whenever it was available, to provide updates and reassurance that the area navigation systems were performing satisfactorily. As INS systems became more miniaturised, two or three would be installed on an aircraft to provide some redundancy and improve accuracy by allowing an average, or triple-mix, position to be calculated. Using arrangements such as this, it became possible to automatically monitor the performance of the RNAV system. This allowed the first standard, RNAV 10, to be published which dictated that the total system error must be within ±10nm, laterally and along-track, for at least 95 per cent of the total flight time.
By the mid-1970s, aircraft such as the L1011 TriStar had entered service that employed a navigation system comprised of triple INS units linked to a Flight Management System (FMS) computer that could also automatically control two VOR/DME receivers. The FMS would use all of the resources available to it to calculate the most accurate aircraft position; if over remote areas, it would use the INS triple-mix position, but when in airspace where VOR/DME was available, it would tune those receivers to the most appropriate stations and obtain an accurate radio fix to update its position. If two DME stations were available and the geometry was correct, the most accurate radio aid navigation solution was a 90 degree DME/DME fix that would update the FMS position to a tenth of a mile.
Clearly this type of RNAV system could provide greater accuracy and reliability when flying overland, where radio aids were plentiful, than when flying over the North Atlantic. So whilst it could only achieve RNAV 10 performance standard over remote areas, when operating over mainland Europe it could meet RNAV 1 accuracy (±1nm for 95% of the time) and safely allow smaller aircraft separation distances. So the concept of relating a specific navigation performance to a particular region or type of airspace was born, and these standards have evolved into Required Navigation Performance (RNP) standards.
With the arrival of GPS systems, not only did greater accuracy became available, but the ability to monitor system performance improved which led to the development of additional, more demanding, RNP specifications.
RNAV and RNP Specifications
To summarise, RNAV systems and RNP systems are fundamentally similar. The key difference between them is the requirement in RNP specifications for on-board performance monitoring and alerting systems:
- Early systems that allowed RNAV operations focused on providing navigational accuracy and did not necessarily have any on-board performance monitoring.
- However, systems conforming to more modern RNP specifications facilitate the requirement for on-board navigation performance monitoring and alerting.
PBN Specifications
In 2008, ICAO’s Performance Based Navigation (PBN) Concept replaced the RNP Concept; it was introduced through publication of the ICAO PBN Manual (Doc 9613) and it included a specific definition of terms. The PBN concept is made up of three components:
- Navigation Specification. A Navigation Specification is a technical and operational specification that identifies the navigation performance and functionality required of the area navigation system for operation along a particular route, procedure or within an airspace where approval against the navigation specification is prescribed. These include:
- the performance required of the area navigation system in terms of accuracy, integrity, continuity and availability.
- the functions available in the area navigation system so as to achieve the required performance.
- the navigation sensors, integrated into the area navigation system, that may be used to achieve the required performance.
- flight crew and other procedures needed to achieve the performance mentioned of the area navigation system.
- The Navigational Aid (NAVAID) Infrastructure. The NAVAID Infrastructure refers to ground or space-based navigation aids (except the NDB which is excluded from use in PBN) that are mentioned in the Navigation Specification.
- The Navigation Application. The Navigation Application is when a Navigation Specification and an associated NAVAID Infrastructure are applied to ATS routes, instrument approach procedures and/or defined airspace volume, in accordance with the airspace concept. Examples of how the Navigation Specification and NAVAID Infrastructure may be used together in a navigation application include RNAV or RNP SIDs and STARs, RNAV or RNP ATS routes, and RNP approach procedures.
Some fundamental points must be understood about PBN:
- PBN requires the use of an on-board RNAV system.
- PBN creates requirements for airworthiness certification and operational approval to use RNAV systems in airspace implementations.
- The RNAV system’s functionality, as well as its navigation accuracy in the NAVAID Infrastructure environment of the subject airspace, must conform to the requirements stipulated in the relevant ICAO navigation specification. Put simply, in order to meet PBN standards, both the aircraft and flight crew have to be qualified against the particular Navigation Specifications required for operation in the airspace. The required Training Syllabus is part of the Navigation Specification and published in the ICAO PBN Manual.
By March 2013, the fourth edition of the PBN Manual included eleven navigation specifications; four of these were RNAV specifications and seven were RNP specifications.
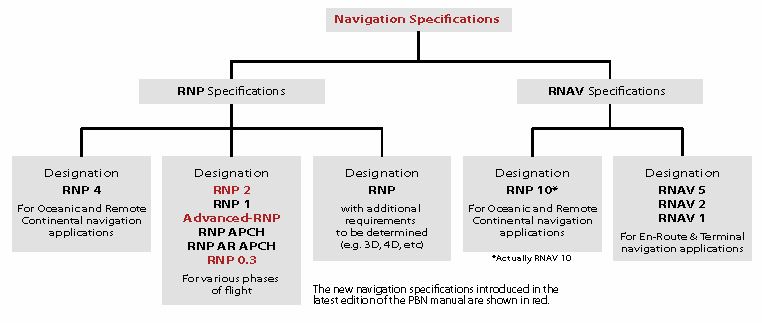
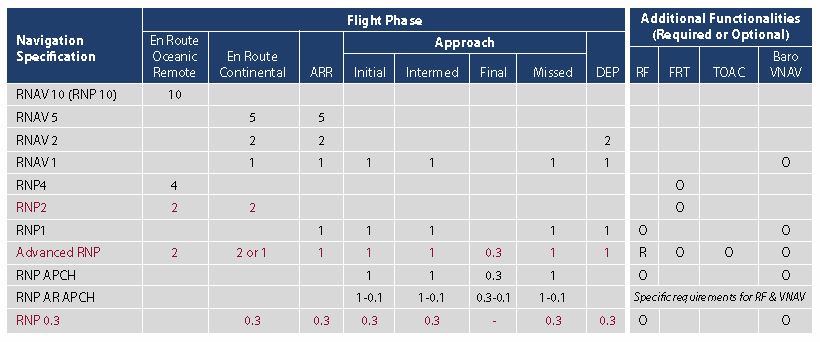
The useful chart below illustrates the navigational accuracy required (in +/- nms) for the appropriate phase of flight in each of the Navigation Specifications:
The G1000 GNSS fitted to our Seneca V aircraft;
- has been found to comply with RNP10, RNAV2 and RNAV1 operations.
- complies with the equipment requirements for PRNAV and BRNAV operations in accordance with AC 90-96A and JAA TGL-10 Rev 1.
- The P-RNAV standard is not identical to the ICAO RNAV 1 specification, but may be viewed as a European Application of the RNAV 1 specification.
- The B-RNAV standard contained in European Aviation Safety Agency (EASA) Acceptable Means of Compliance – AMC 20-4 is identical to the RNAV 5 specification in ICAO PBN.
- has been evaluated and approved in accordance with EASA’s AMC 20-27 , AMC 20-28 and CRI-F-87 in order to perform approaches using:
- Lateral Precision with Vertical (LPV) guidance minima using a Satellite Based Augmentation System.
- RNAV GNSS approach operations to LNAV/VNAV minima where angular VNAV guidance is provided by SBAS augmented GNSS.














