
Maintaining The Hold. Correctly maintaining a holding pattern is simply a matter of flying accurate, drift corrected, headings and correcting the length of the outbound leg in order to:
- Attain and maintain the required inbound track to the holding fix.
- Fly the hold in 4 minutes (unless the hold is based on DME ranges).
The wind affects the hold in 2 ways:
Crosswind. To roll out on the inbound track, the outbound hold heading must be adjusted for the crosswind. For the first hold, apply three times the calculated drift to the outbound heading; however 30° is the maximum drift to apply. If you then find that your drift-corrected heading is within 30° of the wind direction, reduce the drift correction to twice the drift. This is because the effect of drift is significantly reduced at angles below 45°. If flying a standard right-hand hold with an inbound track of 090° and a wind from the south, the drift corrected track made good should look something like the dashed line on the illustration below: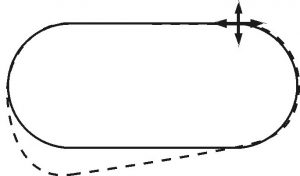
Timing. Start the timer when you are abeam the beacon on the outbound leg – calculate the abeam position by adding or subtracting 90° from the published holding track. The outbound leg timing should then be extended or shortened by the head/tailwind component, calculated after applying the drift correction. The requirement is to fly a “a one-minute outbound leg adjusted for wind”. Therefore, assess the head/tailwind component on the outbound leg, halve it, and apply it as a correction to the outbound leg time by increasing or decreasing by that number of seconds. For example: 20 kt headwind, half is 10 kt, outbound leg needs to be extended to 1 min 10 seconds. The aircraft should then be back on top of the beacon after approximately 3 min.
Example – OX Hold for RW19, Wind 240°/20kts. In the following picture, the aircraft is established on the Inbound leg of the RW19 hold at Oxford with the wind at 240°/20kts.

RW19 Hold at OX – Inbound Leg, Wind 240/20
The Course Pointer (CP) is selected to Nav 2, with 116.0 set (a null setting), to avoid a distracting VOR or ILS Course Deviation Indicator (CDI) being displayed. The inbound track of the hold (338°) is set on the CP.
The ADF is set to the OX beacon (367) and displayed on Bearing Pointer 1; it can be seen that the aircraft is inbound to the OX on the 158° radial.
The Oxford ILS (108.35) is set on Nav 1, with the DME set to Nav 1 the range from Oxford will be displayed in the DME window.
The aircraft is heading 327° which is compensating for drift and resulting in the magenta Track Diamond (TD) indicating that the aircraft is tracking 338° on the inbound radial. Remember that the TD cannot be inhibited on the G1000, you can therefore get used to using it as it will be available on the IR test; all modern airliners also have that feature.
Finally, the Heading Bug (HB) has been set to the required outbound heading in anticipation of the turn at the beacon. With 20 kts of wind the maximum drift is 10° (20 ÷ IAS in miles/minute) and, using the clock-code, as the wind is 80° off of the track, all of it applies. Therefore, three times the drift is 30°, the maximum correction permitted, so the outbound heading will be 158°+30°=188°. As 188° is not within 30° of the wind direction (240°), the drift does not need to be reduced to twice instead of three times.
This arrangement is about as close as you can get on this aircraft to how you will set things up in a commercial airliner using multi-pilot techniques. It allows you to quickly and easily swap the CP to Nav 1 when outbound and be ready for an ILS procedure and to have everything set for the left-hand seat pilot to monitor System One so that the right-hand seat pilot can cross-check everything using his/her System Two.
Outbound.
After rolling out of the outbound turn, start the timer when the aircraft is abeam the ADF. This occurs when Bearing Pointer 1 is at 90° to the Course Pointer, as shown in the picture below. Then calculate the time at which you need to start the the inbound turn.

RW19 Hold at OX – Inbound Leg, Wind 240/20
In the picture above, take note of the relationship between the aircraft heading, the magenta Track Diamond (TD) and the tail of the Course Pointer (CP). If you are flying the correct heading, the TD will appear one third of the way between the aircraft heading and the tail of the CP. If the TD appears on the other side of the aircraft heading (outside of the arch from the Heading to the tail of the Course Pointer), then you have applied drift in the wrong sense!
Inbound.
After starting the inbound turn, monitor Bearing Pointer 1 (the ADF) as you turn to ensure that you roll out of the turn on the correct inbound radial. Remember that, when bank is applied, the ADF will over-read in the direction of the turn due to ADF Dip Error; however, we can use this to our advantage.
Gate Two Technique. With 20° of bank applied on this aircraft, the ADF will over-read by approximately the number of degrees needed to complete the turn when you have 60° of turn remaining. So with 60° of turn to go and 20° of bank applied (the Gate Two position), Bearing Pointer 1 should be aligned with the CP if you are about to roll out on the correct inbound radial. If that is the case, then roll out on the drift corrected inbound heading. However, if Bearing Pointer 1 is not on the CP when at Gate Two, you must take one of the following appropriate actions:
- Outside the Inbound Radial. If you are about to go through the inbound radial before rolling out, then when you are at Gate Two, the Bearing Pointer 1 will have passed beyond the CP and look something like the picture below.

At Gate Two when about to roll out beyond the Inbound Radial.
In this case, you will need to continue the turn through the inbound heading so that the Track Diamond (TD) stops to the outside of Bearing Pointer 1 (to the right of) so that you can regain the inbound radial before reaching the beacon.
- Inside the Inbound Radial. If you are about to roll out of the turn before reaching the inbound radial, then when you are at Gate Two, the Bearing Pointer 1 will still have a way to go before reaching the CP and look something like the picture below.

At Gate Two when about to roll out before the Inbound Radial.
In this case, you will need to roll out before reaching the inbound heading so that the Track Diamond (TD) stops to the outside of Bearing Pointer 1 (to the left of) so that you can regain the inbound radial before reaching the beacon.














